Robotski polirni stroj – visoko natančna avtomatizirana površinska obdelava





Podroben diagram
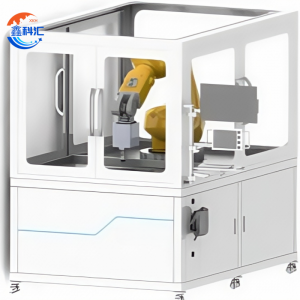

Pregled robotskega polirnega stroja
Robotski polirni stroj je napreden, popolnoma avtomatiziran sistem za obdelavo površin, zasnovan za izpolnjevanje najvišjih zahtev v natančni proizvodnji. Združuje šestosno robotsko krmiljenje, tehnologijo poliranja s povratno zanko in konfiguracijo z dvema glavama za obdelavo širokega nabora materialov in kompleksnih geometrij z izjemno natančnostjo in doslednostjo.
Ne glede na to, ali gre za optične leče, dele za vesoljsko industrijo, komponente preciznega inženirstva ali polprevodniške aplikacije, ta stroj zagotavlja stabilne, ponovljive in visokokakovostne površinske obdelave – tudi pri tolerancah na nanometrski ravni.


Celovita združljivost obdelovancev z robotskim polirnim strojem
Sistem podpira obdelavo:
-
Ravne površineza steklene, keramične in kovinske plošče
-
Valjaste in stožčaste oblikekot so valjčki, gredi in cevi
-
Sferične in asferične komponenteza optične sisteme
-
Prosto oblikovane in zunajosne površines kompleksnimi krivuljami in prehodi
Zaradi svoje vsestranskosti je primeren zatako masovna proizvodnja kot visoko natančna izdelava po meri.
Ključne značilnosti in prednosti robotskega polirnega stroja
1. Tehnologija dvojne polirne glave
-
Opremljeno zenojni obratinsamovrtenjepolirne glave za fleksibilnost.
-
Zmogljivost hitre menjave orodja podpira več načinov obdelave brez dolgih izpadov.
-
Idealno za preklapljanje med grobim in finim poliranjem.
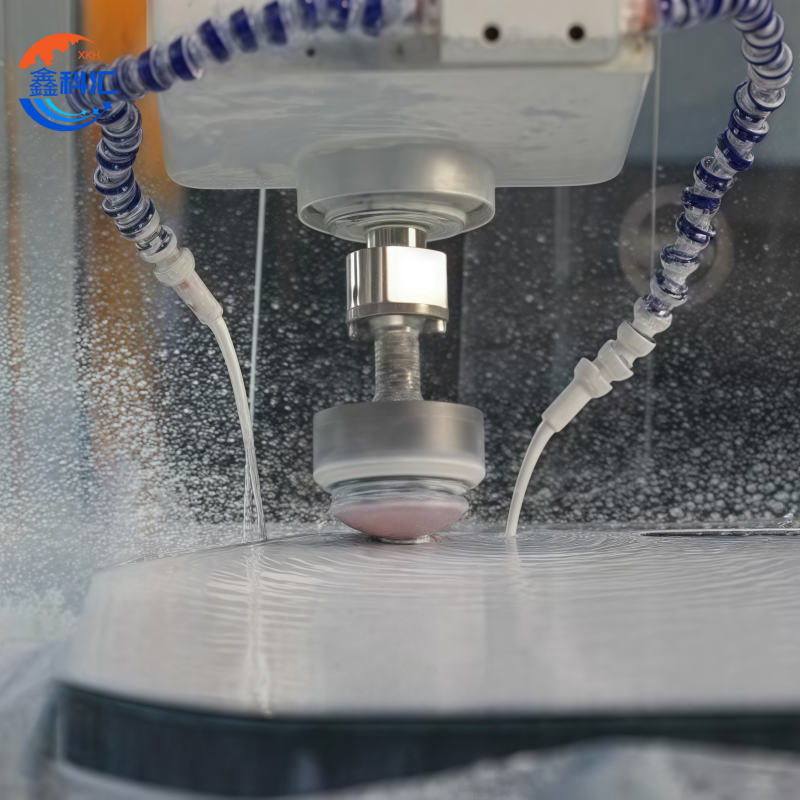
2. Sistem za natančno krmiljenje sile
-
Spremljanje v realnem časutlak, temperatura in pretok polirne tekočine.
-
Enakomerna uporaba sile zagotavlja enakomerno površinsko obdelavo po celotnem obdelovancu.
-
Sposoben samodejnega prilagajanja površinskim nepravilnostim.
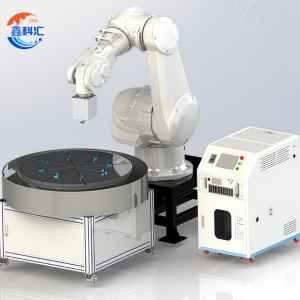
3. Šestosni robotski nadzor
-
Popolna svoboda gibanja za obvladovanje kompleksnih geometrij.
-
Gladke in natančne poti gibanja, izračunane z naprednimi algoritmi.
-
Visoka natančnost ponovljivega pozicioniranja od ±0,04 mm do ±0,1 mm, odvisno od modela.
4. Pametna avtomatizacija in merjenje
-
Orodja za samodejno kalibracijo za natančno nastavitev in poravnavo.
-
Koordinatni merilni sistem za natančno pozicioniranje.
-
Neobveznospletno spremljanje debelineza nadzor kakovosti v realnem času.
5. Industrijska kakovost izdelave
-
Dvojna servomotorna zasnova poveča učinkovitost in stabilnost poliranja.
-
Trdna mehanska struktura zmanjšuje vibracije in zagotavlja dolgotrajno vzdržljivost.

Tehnične specifikacije robotskega polirnega stroja
| Model opreme | Robotovsko telo | Ponavljanje natančnosti pozicioniranja | Območje premera obdelave | Polirna glava z enim vrtenjem | Večrotacijska polirna glava | Majhno orodje | Poliranje glavnih vrst koles | Poliranje sferične glave | Končaj hitro menjavo | Orodje za samodejno kalibracijo | Koordinatna merilna glava | Spletno spremljanje debeline | Platforma za numerično krmiljenje |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / celoten razpon | Φ50~Φ500 mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / celoten razpon | Φ50~Φ600 mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / celoten razpon | Φ80~Φ800 mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / celoten razpon | Φ100~Φ1000 mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / celoten razpon | Φ100~Φ1000 mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / celoten razpon | Φ200~Φ2000 mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / celoten razpon | Φ200~Φ2000 mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Pogosta vprašanja – Robotski polirni stroj
1. Katere vrste obdelovancev lahko obdeluje robotski polirni stroj?
Naš robotski polirni stroj podpira različne oblike in površine, vključno z ravnimi, ukrivljenimi, okroglimi, prosto oblikovanimi in kompleksnimi konturami. Primeren je za optične komponente, precizne kalupe, kovinske površine in druge visoko precizne aplikacije poliranja.
2. Kakšna je razlika med enojno rotacijskimi in večrotacijskimi polirnimi glavami?
-
Polirna glava z enim vrtenjemOrodje se vrti okoli ene osi, kar je idealno za standardno površinsko obdelavo in hitro odstranjevanje materiala.
-
Večrotacijska polirna glavaOrodje združuje vrtenje z lastno vrtenjem (kroženjem), kar omogoča bolj enakomerno poliranje ukrivljenih in nepravilnih površin.
3. Kolikšen je največji premer obdelave?
Odvisno od modela:
-
Ročaj kompaktnih modelov (npr. IRP500S)Φ50–Φ500 mm.
-
Veliki modeli (npr. IRP2000AD) zmorejo doΦ2000 mm.
O nas
XKH je specializirano za visokotehnološki razvoj, proizvodnjo in prodajo posebnega optičnega stekla in novih kristalnih materialov. Naši izdelki so namenjeni optični elektroniki, potrošniški elektroniki in vojski. Ponujamo safirne optične komponente, pokrove za leče mobilnih telefonov, keramiko, LT, silicijev karbid SIC, kremen in polprevodniške kristalne rezine. Z strokovnim znanjem in najsodobnejšo opremo se odlikujemo v obdelavi nestandardnih izdelkov in si prizadevamo postati vodilno visokotehnološko podjetje na področju optoelektronskih materialov.

Sorodni izdelki
-

4H-semi HPSI 2inch SiC substrat wafer Proizv...
-
Po meri kvadratna škatla za prevoz kvadratno okno p ...
-

6-palčna HPSI SiC substratna rezina silicijevega karbida ...
-

Safirni korund za kristalno rušenje dragih kamnov Al2O3...
-

Polirni material iz aluminijastih kovinskih monokristalov ...
-

Au prevlečena rezina, safirna rezina, silicijeva rezina ...